 |
||||||
| HOME |
||||||

|
We are
interested in investigating a new approach to robotic
therapies wherein the patient would be given manual
control over the exercise movements of the therapy.
Through the use of a teleoperated
electromechanical robot, the patient could manipulate and assist their
impaired
limbs with their unaffected limbs. This
project is specifically aimed at rehabilitation for partial spinal cord
injured
subjects, where the impaired limbs are the legs and the unimpaired
limbs are
the hands/arms. The ultimate
rehabilitation
goals do not involve completely removing the physical therapist from
the
therapy. Rather, we propose a marriage of
physical therapist expertise, robotic automation, and self-directed
subject
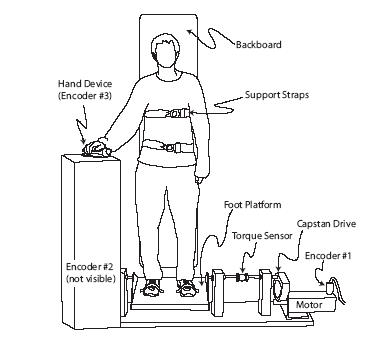
control over assistance in the rehabilitation process and training. As a first step towards looking at
self-assistance through teleoperation, we have chosen a simple task:
manipulation of a virtual environment through a single axis at the feet
(the
primary ankle joint). |
|
|
|
|
| Danek, Kari Gillespie, R. Brent Aldridge, J. Wayne Ferris, D.P. Grizzle, J.W. |
|
 Related
Project(s) Related
Project(s) |
|
| |
|
| Upper Extremity Stroke Rehabilitation | |
 Research
Project Papers Research
Project Papers |
|
| A Dual Input Device for
Self-Assisted Control of a Virtual Pendulum |
|
 |
Project Sponsors |
| University of Michigan
Office of the Vice President for Research and the National Science Foundation |
|
 Research
Project Member(s)
Research
Project Member(s)