PFR: e.g. d[cA,cB]/dt = [rA(cA,cB),rB(cA,cB)]
CSTR: e.g. [cA,cB]-[cAo,cBo] = [rA(cA,cB),rB(cA,cB)]
We will now write these equations in a general form that can be used for any problem.
For our example: c = [cA,cB]
The characteristic vector must contain sufficient variables to fully describe the reaction kinetics. In our system the reaction kinetics only depend on cA and cB, so we only need to include these in the characteristic vector.
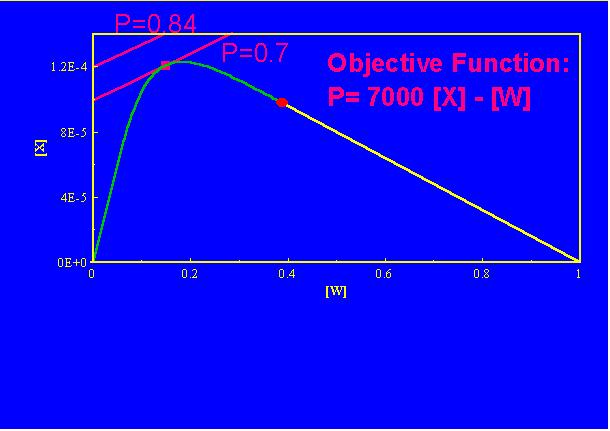
It must also contain sufficient variables to describe the objective function. The objective function is the function that we are trying to optimise. In our case we are trying to maximise the production of B, so the objective function is just:
P = cA.
There are thus no extra variables to add to the concentrations cA and cB to form the characteristic vector. In some problems we may be asked to minimise the total space time of the reactor system. Then we must include the space time in the characteristic vector.
In our example the reaction vector is given by:
r(c) = [rA(cA,cB),rB(cA,cB)] = [-k1cA+k2cB-k4cA^2, k1cA-k2cB-k3cB]
for c = [cA,cB]
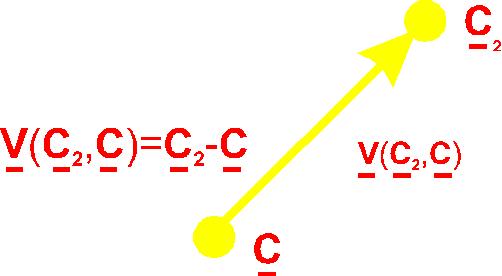
Just as with reaction, mixing is represented by a vector. The mixing vector, v(c1, c2), points from the stream being considered to the stream that we are mixing with.
Now that we know the geometry of the fundamental processes let's look at the geometry of some ideal reactors.
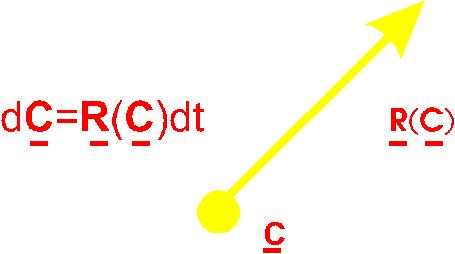
dc/dt = r(c)
This means that the reaction vector is tangent to the PFR curve at all points along the PFR curve. This is because of the properties of ordinary differential equation. Because the reaction vector is always tangent the PFR curve is termed a trajectory. Different feed points will lead to different trajectories. The trajectories will never cross because there is only one reaction vector at a point.

c - c0 = r(c)t
The general interpretation is that the reaction vector points in the same direction as the mixing vector v=c-c0. That is the vectors are colinear. Also the scaled vector r(c)t has the same length as the mixing vector.
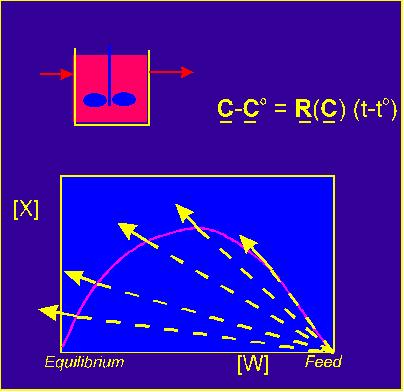
This is true for all the CSTR points, each with a different space time t.
Now that we understand the geometry of the processes and the ideal reactors we can begin to solve problems using the Attainable Region method.
| The Attainable Region is defined as the set of all possible products that can be obtained in a steady-state reactor system with given feed. |
There are two reasons that we must find all the possible products:
To find the attainable region (AR) requires an iterative construction process. However, we have a set of necessary conditions or "rules" that let us check to see if we have found all the possible products and to help us construct the region.
The necessary conditions that must be satisfied in order for the proposed region to be the AR are: