Kinect Car
University of Michigan
EECS 373 Winter 2011
High Level Design
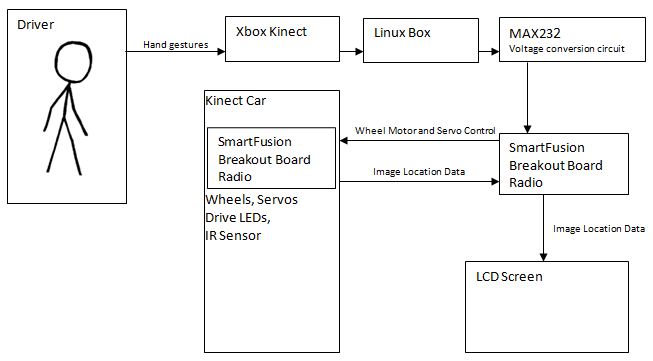
For our final project we built an RC car that is controlled by hand gestures using a Xbox Kinect. We employed a skeleton tracking algorithm in order to use the Xbox Kinect to control the car only by body motion, without holding any physical controller. We also employed a color tracking algorithm with a CMU camera on the car to send information about the location of a specifically colored object.
The design required interfaces between:
The Kinect and a computer running Linux
We receive and process the Kinect's data through USB on the computer.
The Linux computer to our Smartfusion board
The board receives processed Kinect data via serial bus from the computer.
From one Smartfusion to another
Both boards have expansion boards containing radios which we use to send drive control and camera data back and forth.
The on-car board to every car component
Once commands are received via RF communication, they are processed on the Smartfusion board on the car which determines what signals to control all of the car's components with.
The CMU camera back to the LCD display
We have an on-car camera which does color tracking, The data this camera produces is sent through the Smartfusion board on the car back to the other board then displayed on an LCD display attached to the control board.