Kinect Car
University of Michigan
EECS 373 Winter 2011
Media
Videos
- Project Walkthrough
- Final test before Project Expo
- First servo test
- Rear edge sensor
- Front edge sensor
- Vision camera test
- Backup lights
Pictures
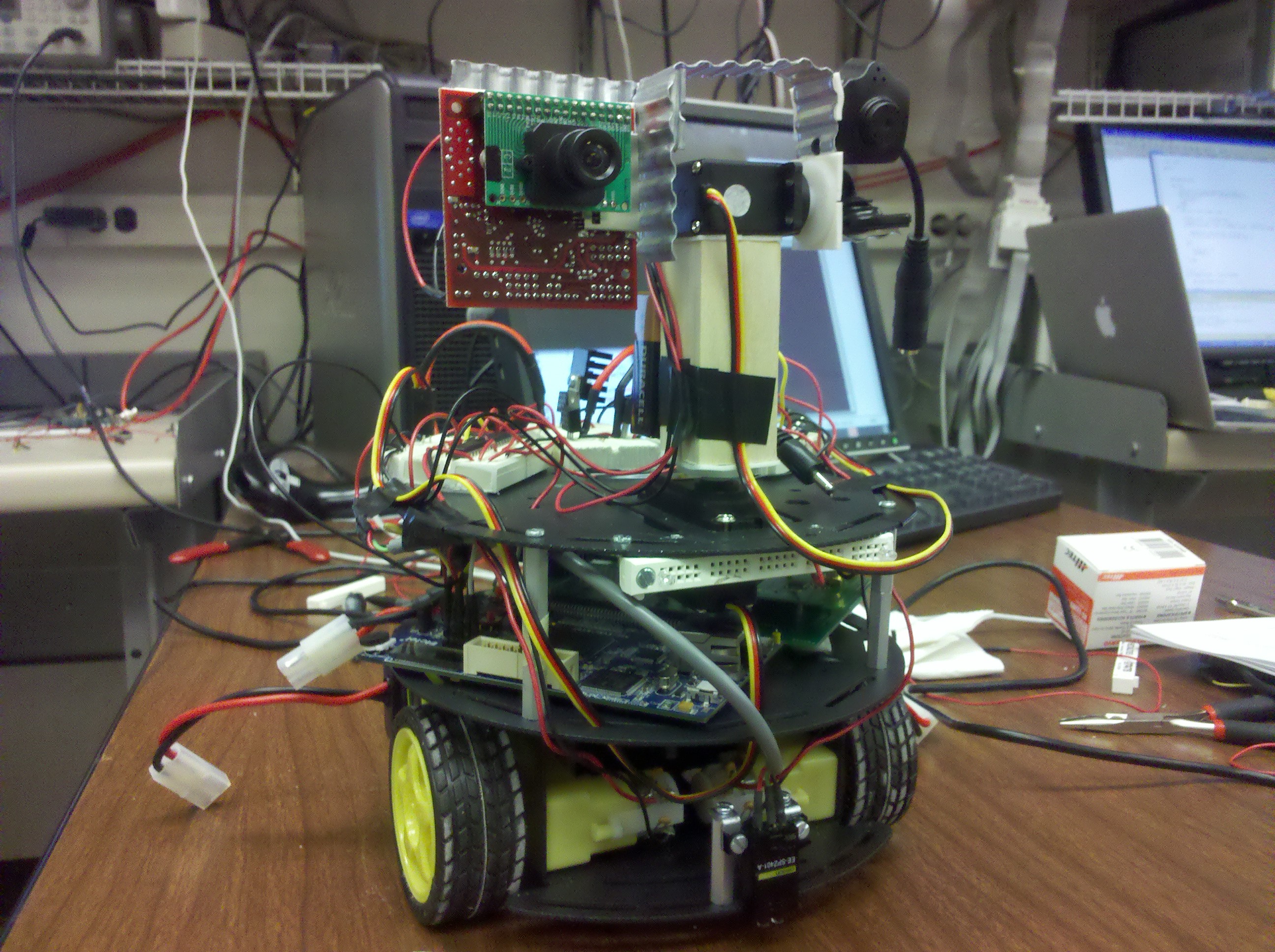
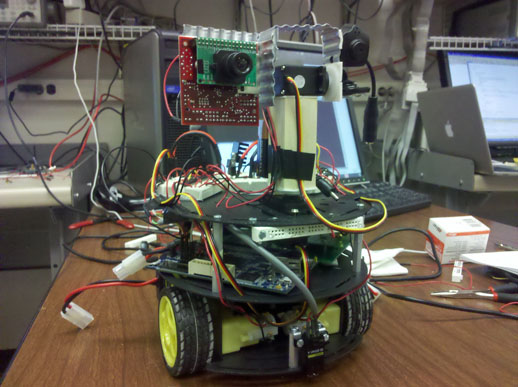
- KC
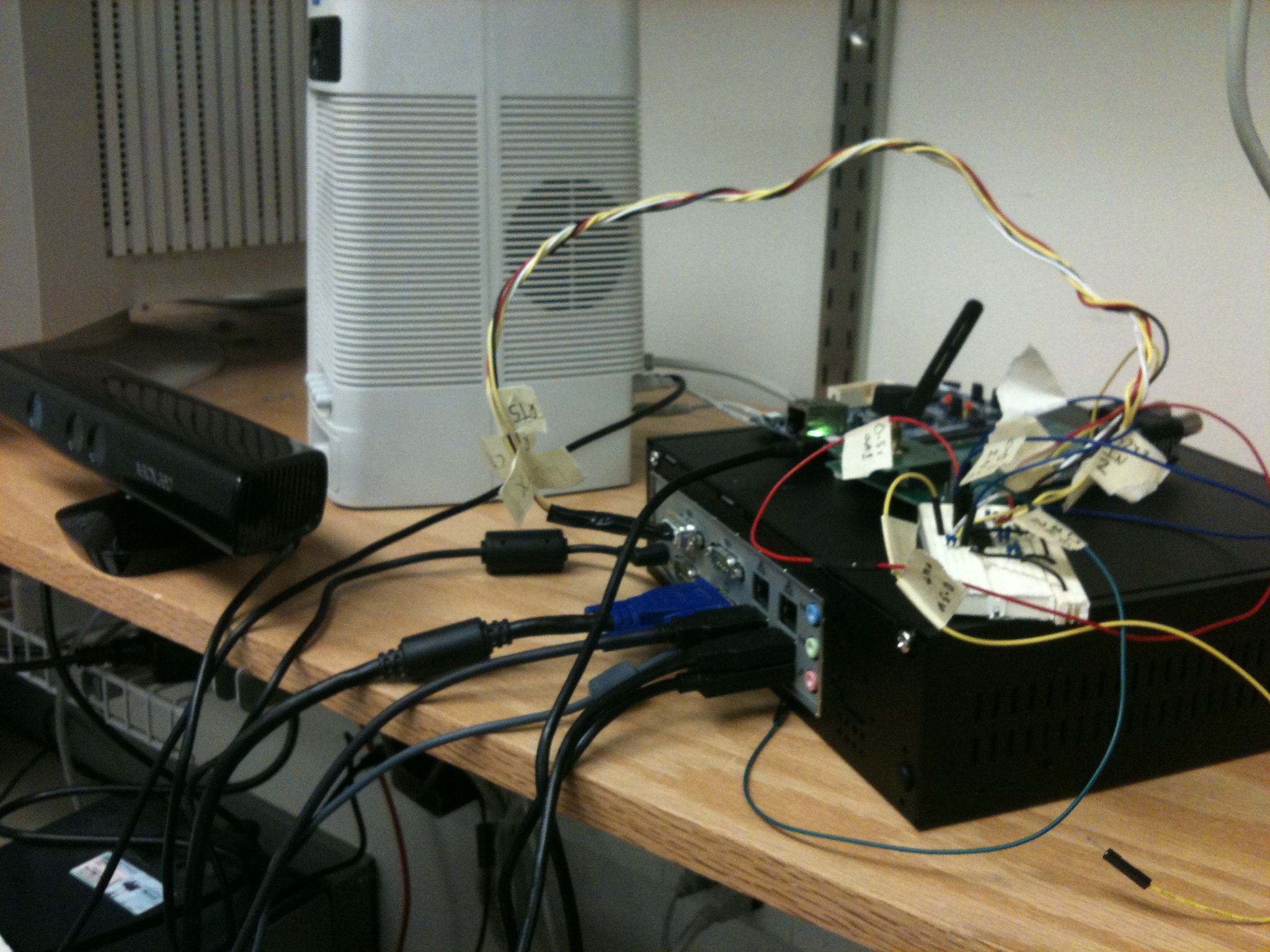
- Kinect, Linux Box and MAX232
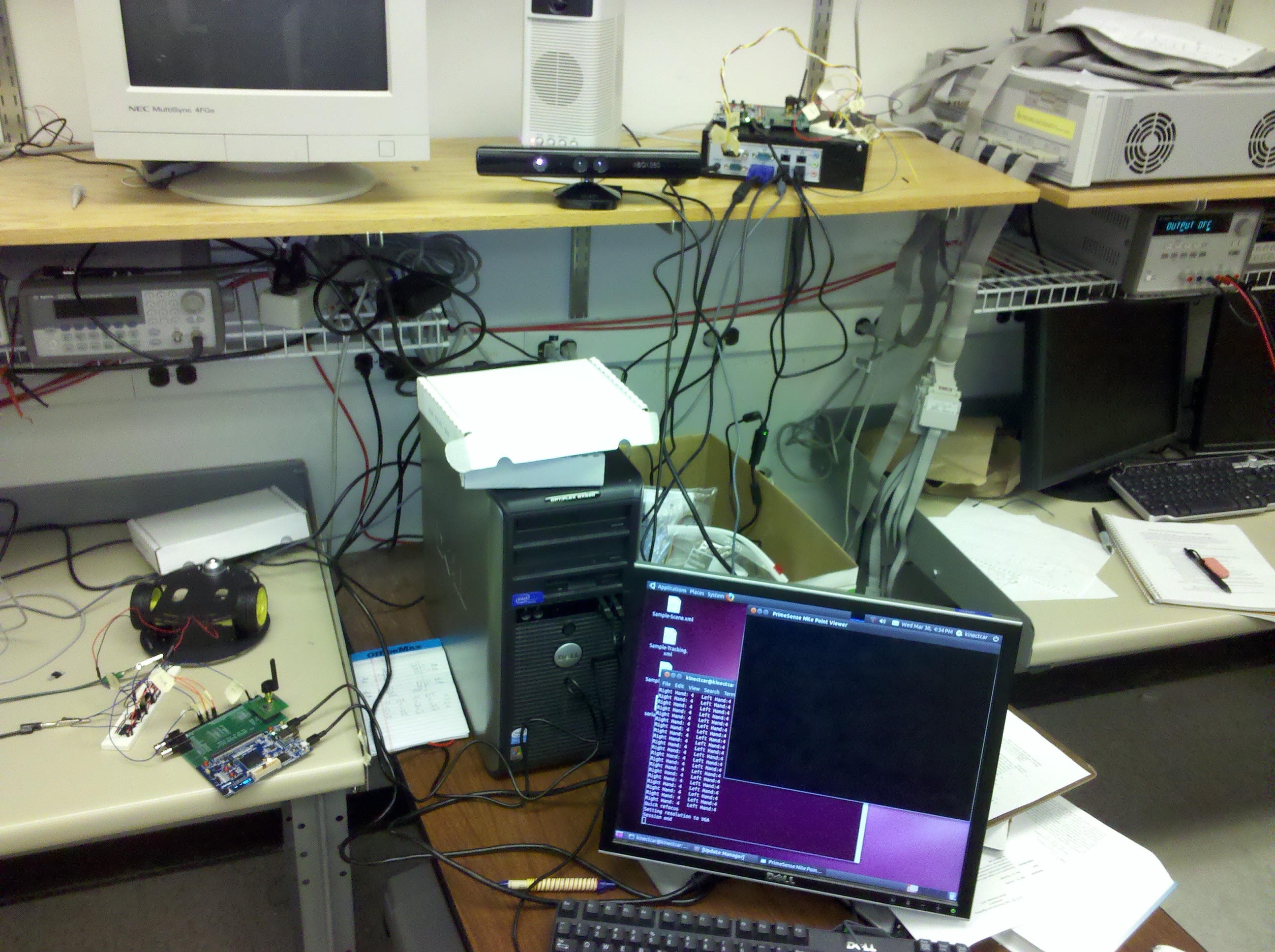
- Early setup